ROBÓTICA EDUCATIVA

La robótica educativa es un sistema de enseñanza
interdisciplinar que permite a los estudiantes desarrollar competencias
STEAM, que incluye las áreas de Ciencias, Tecnología, Ingeniería, Artes y
Matemáticas, así como la Lingüística, Estética y Ética.
Nota: el término STEM fue acuñado por primera vez por la National Science Foundation (NSF), en los EE.UU. a mediados de la década de los noventa.
Desde
la Robótica se aprende a construir modelos o prototipos que normalmente van
acompañados de un programa informático que hace que el robot ejecute órdenes
(ya sea desplazarse, identificar colores o medir distancias a un objeto, etc).
Algunos
software de programación están basados en iconos y no en instrucciones
escritas, para que el aprendizaje sea más atractivo e intuitivo. La finalidad
es que el estudiante se familiarice con los dispositivos programables, cada vez
más presentes en el entorno (computadores, teléfonos móviles, …).
COMPETENCIAS EN ROBÓTICAo Comprensión
de conceptos principales en física, electrónica y programación.
o Aplicación
de conceptos fundamentales de electrónica, electromagnetismo, física y
robótica.
o Rutinas
de Programación en diversos software de aplicaciones robóticas.
o Diseño
y construcción de modelos o prototipos a través del uso de herramientas
tecnológicas y softwares.
o Capacidad
de trabajo colaborativo y participativo,
desde la conformación de semilleros de investigación formativa en el campo de
la robótica.
OBJETIVOS DE APRENDIZAJE
o Reconocer
la electrónica digital como la base del funcionamiento de diversos equipos o
prototipos tecnológicos .
o Identificar
y utilizar fundamentos de las ciencias naturales y otras áreas para el
funcionamiento de los prototipos robóticos.
o Programar
diversas rutinas de aplicaciones robóticas que incluyan sensores y actuadores.
o Diseñar
e implementar modelos o prototipos robóticos a través del uso de herramientas
tecnológicas y softwares.
o Desarrollar
un proyecto tecnológico desde la conformación de los semilleros de
investigación formativa.
UNIDAD 1. INTRODUCCIÓN A LA ELECTRÓNICA
Elementos Pasivos
Elementos Activos
Semiconductores
Electrónica Análoga y Digital
Pilas y Bateria
Interruptores y Pulsadores
Práctica: Funcionamiento de los elementos electrónicos














ELECTRÓNICA ANÁLOGA y ELECTRÓNICA DIGITAL


PILAS: Está conformada por una celda química de 1,5 V.


BATERÍAS PRIMARIAS:

Práctica: Funcionamiento de los elementos electrónicos
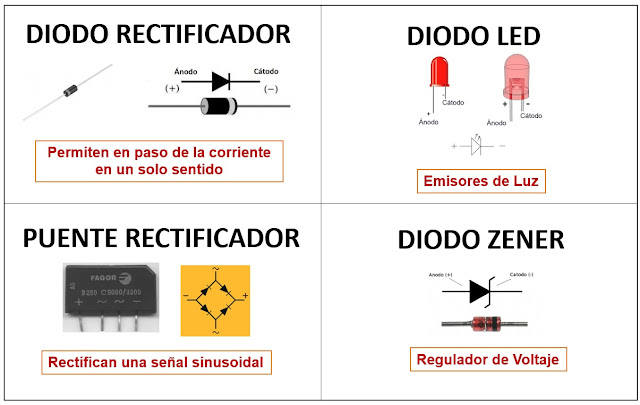
ELEMENTOS PASIVOS





ELEMENTOS ACTIVOS

Principales componentes activos de
acuerdo a su función dentro de un circuito:

SEMICONDUCTORES




EL TÉRMINO "ANALÓGICO"
se refiere a las magnitudes o valores que varían con el tiempo en forma
continua como la distancia y la temperatura, la velocidad, que podrían variar
muy lento o muy rápido como un sistema de audio.
EL TÉRMINO "DIGITAL"
se refiere a cantidades discretas como la cantidad de personas en un una sala,
cantidad de libros en una biblioteca, cantidad de autos en una zona de
estacionamiento, etc.
PILAS y BATERIAS
Transforman la energía química en energía eléctrica.PILAS: Está conformada por una celda química de 1,5 V.
BATERIA: Conformada por dos o más pilas eléctricas conectadas en serie, en paralelo o en
mixto.


BATERÍAS PRIMARIAS:
Las
que no se pueden recargar; son las convencionales o alcalinas y se usan en
múltiples aplicaciones, algunas tan vitales como la alimentación de marcapasos.
BATERÍAS SECUNDARIAS:
Las
que se pueden recargar. Actualmente existen dos tipos de baterías recargables
que dominan el mercado: las baterías de plomo y las de níquel-cadmio.
Las
baterías de plomo están en los automóviles, pero sólo destinadas a cubrir las
necesidades de arranque, iluminación e ignición (no tienen suficiente energía
para mover el coche).
Las
baterías de níquel-cadmio a falta de mejores baterías, se emplean en artículos
de electrónica de consumo como videocámaras y computadores o teléfonos móviles.
BATERIAS DE LIPO (POLÍMERO DE LITIO)
Son baterías recargables (células de
secundaria), compuestas generalmente de varias células secundarias idénticas en
paralelo para aumentar la capacidad de la corriente de descarga, y están a
menudo disponibles en serie de "packs" para aumentar el voltaje total
disponible.

Número de Celdas (S)
El número S se corresponde con el número de celdas.











Conexionados del DIP SWITCH


:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::


:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::


CONEXIONADO DE LOS DIODOS LED'S



En Arduino se puede aplicar una resistencia Pull Up en las entradas digitales a través de código. Simplemente colocando un pin en modo INPUT_PULLUP con la instrucción pinMode.
Dispositivo semiconductor de tres terminales, que tiene la propiedad de controlar la corriente eléctrica que circula a través de él, a partir de una corriente eléctrica muy pequeña.






Qué es Robótica
1ª Generación.





 Fuente: Revista Saber Electrónica.
Fuente: Revista Saber Electrónica.
Es una rueda o cilindro dentado empleado para transmitir un movimiento giratorio o alternativo desde una parte de una máquina a otra.



























Los pines IN1, IN2, y IN3 e IN4, controlan la dirección de giro, respectivamente, de la salida A y B.
Los pines ENA y ENB desactivan la salida. Podemos conectarlos permanentemente mediante el uso de un jumper, o conectar una señal PWM para controlar la velocidad de giro.






































P R O G R A M A C I Ó N























El número S se corresponde con el número de celdas.
Una batería 4S (4 celdas), está compuesta por 4 sub-baterías conectadas en serie.
Capacidad en mAh
A mayor número de miliamperios más capacidad de carga, pero conlleva a un mayor tamaño y por tanto de peso.
Tasa de descarga, número C
Se mide en (A*h) o (mA*h). Se representa con la letra C (no confundir con Coulomb).
Una batería que tiene por ejemplo C = 500 quiere decir que puede suministrar una corriente de 500mA durante una hora (250 mA durante 2 horas, 125 mA durante 4 horas... etc)
El término C se utiliza también para definir la corriente de carga. Una corriente de 1C significa que la batería se cargará con la misma corriente que puede suministrar durante una hora.
En el ejemplo anterior 1C = 500 mA.
Normalmente las baterías se cargan a 0,1C durante 14 horas.
Una batería de 2200 mAh es capaz de descargar a 2,2 A en una hora.
Una batería de 1000 mAh 1C se descargaría a 1 A en una hora.
Una batería de 1000 mAh 2C se descargaría a 1 A en media hora.
Tasa de carga, C
También está indicada en C y funciona de una manera muy similar. El cómo se realiza la carga de la batería va a influir en la vida útil de la misma.
Si realizamos una carga a 1C en una batería de 1000 mAh, significa que se ha configurado que la carga se realice a 1 amperios. El tiempo de carga será de aproximadamente de una hora.
Si realizamos una carga a 2C en una batería de 1000 mAh, significa que se ha configurado que la carga se realice a 2 amperios. El tiempo de carga será de aproximadamente de media hora.
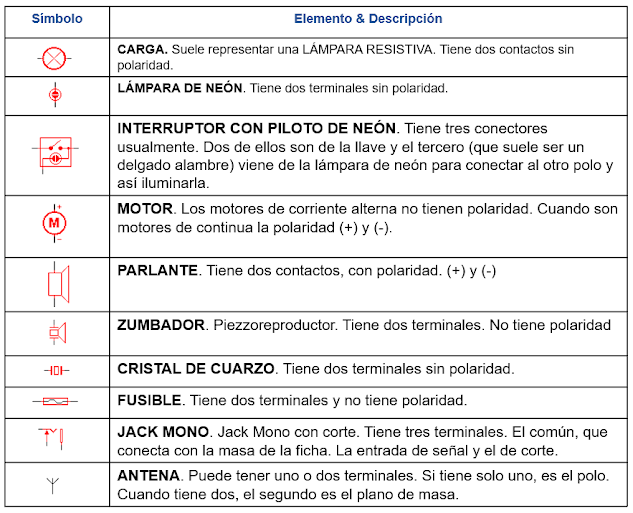
Cierra o abre un circuito, permitiendo el paso o no de la corriente eléctrica.
Un DIP SWITCH es un conjunto de interruptores eléctricos que se presentan en un modelo encapsulado DIP - (Dual In-line Package).
Conexionados del DIP SWITCH
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Conexionados del DIP SWITCH en el Protoboard
::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
CONEXIONADO DE LOS DIODOS LED'S
Las resistencias pull-up y pull-down son componentes
electrónicos utilizados para definir un estado lógico estable en las entradas
digitales de un microcontrolador (como el ESP32, Arduino, etc.). Su función
principal es evitar valores erráticos o indeterminados cuando un botón o sensor
no está activamente conectado a un nivel de voltaje definido.
En Arduino se puede aplicar una resistencia Pull Up en las entradas digitales a través de código. Simplemente colocando un pin en modo INPUT_PULLUP con la instrucción pinMode.
::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
TRANSISTORES
ROBOT SEGUIDOR DE LUZ
MINIROBOT
ROBÓTICA
UNIDAD 2. INTRODUCCIÓN A LA ROBÓTICA
Qué es Robótica
Qué es un Robot
Tipos de Robótica
Áreas y aplicaciones de la Robótica: tracción bípeda (humanoide); artrópodo; brazo mecánico
ROBÓTICA: Es
una rama de las ingenierías mecánica, eléctrica, electrónica que aplica la
informática al diseño y empleo de prototipos que, en sustitución de personas
realizan operaciones o trabajos.
La palabra Robótica posiblemente viene de la palabra checa "robota", que significa "trabajo forzado", "obligación" o "esclavo".
ROBÓT:
Máquina, modelo o prototipo electrónico programable, capaz de manipular objetos
y realizar operaciones antes reservadas sólo a las personas. Es un
dispositivo manipulador multifuncional programable. Es
una integración de
movimientos
(mecánica);
impulsos eléctricos (electrónica); y recibe órdenes (programación).
Manipulador: mecanismo formado generalmente
por elementos en serie, articulados entre sí, destinado al agarre y
desplazamiento de objetos.
ISAAC
ASIMOV (1920–1992): Físico y escritor de ciencia ficción a quien se le atribuye el uso del nombre de
robótica, así como el conjunto de tres conceptos denominados las
tres leyes de la robótica.
1).
Un robot no puede perjudicar a un ser humano, ni con su inacción permitir que
un ser humano sufra daño.
2).
Un robot ha de obedecer las órdenes recibidas de un ser humano, excepto si
tales órdenes entran en conflicto con la primera ley.
3).
Un robot debe proteger su propia existencia mientras tal protección no entre en
conflicto con la primera y segunda ley.
ROBÓTICA
INDUSTRIAL.
Suele ser
el típico brazo que suelda, pinta o ensambla partes de un producto en la cadena
de montaje de la fábrica en cuestión (automovilística).
Para la Asociación de Industrias
Robóticas (RIA), un robot
industrial es un manipulador multifuncional
reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos
especiales, según trayectorias variables, programadas para realizar tareas
diversas.
Esta definición, ha sido adoptada por la
Organización Internacional de Estándares (ISO) que define al robot industrial
como: Manipulador multifuncional reprogramable con varios grados de libertad,
capaz de manipular materias, piezas, herramientas o dispositivos especiales
según trayectorias variables programadas para realizar tareas diversas.
Según la IRF (Federación Internacional de
Robótica) se pueden mencionar varios tipos de robot industriales:
Seriales
De
trayectoria controlable
Adaptativo
Telemanipulado.
La
Federación Internacional de Robótica (IFR) entiende como un robot industrial a
una máquina de manipulación automática, reprogramable y multifuncional con tres
o más ejes que pueden posicionar y orientar materias, piezas, herramientas o
dispositivos especiales para la ejecución de trabajos diversos en las
diferentes etapas de la producción industrial, ya sea en una posición fija o en
movimiento.
ROBÓTICA EN SERVICIO.
Son
todos aquellos que se diferencian de los robots industriales por realizar trabajos diferentes a los que se puede desarrollar un brazo robótico
industrial.
Robot
antiminas (militar)
Robot
aspiradora
Robot para el mantenimiento de líneas
de alta tensión
Robot para rescates
submarinos
Dentro
de los robots de servicios se podrían incluir los robots domésticos, robots de
ocio y robots de educación.
ROBOT
DOMÉSTICO.
Son
aquellos que realizan trabajos como barrer, aspirar el suelo, fregar, etc.
ROBOT
DE OCIO.
Los robots
mascota.
ROBOT
DE EDUCACIÓN.
Los
robots para desarrollar procesos
de enseñanza-aprendizaje.
CLASIFICACIÓN DE LOS ROBOTS
Según
su cronología
1ª Generación.
Manipuladores. Son
sistemas mecánicos multifuncionales con un sencillo sistema de control, bien
manual, de secuencia fija o de secuencia variable.
2ª
Generación.
Robots
de
aprendizaje.
Repiten una secuencia de movimientos que ha sido ejecutada previamente por un
operador humano. El modo de hacerlo es a través de un dispositivo mecánico. El
operador realiza los movimientos requeridos mientras el robot le sigue y los
memoriza.
3ª
Generación.
Robots
con
control sensorizado.
El controlador es un
computador que
ejecuta las órdenes de un programa y las envía al manipulador para que realice
los movimientos necesarios.
4ª
Generación.
Robots
inteligentes. Son
similares a los anteriores, pero además poseen sensores que envían información
a la computadora de control sobre el estado del proceso. Esto permite una toma
inteligente de decisiones y el control del proceso en tiempo real.
Según su arquitectura
La
arquitectura, es definida por el tipo de configuración general del Robot, puede
ser metamórfica. El concepto de metamorfismo, de reciente aparición, se ha
introducido para incrementar la flexibilidad funcional de un Robot a través del
cambio de su configuración por el propio Robot.
1. Poliarticulados
En
este grupo
se encuentran los manipuladores, los Robots industriales, los Robots
cartesianos y se
emplean cuando
es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre
objetos con
un plano de simetría vertical o reducir el espacio ocupado en el suelo.
2.
Móviles
Son Robots
con gran capacidad de desplazamiento, basados en carros o plataformas y dotados
de un sistema locomotor de tipo rodante. Siguen su camino por telemando o
guiándose por la información recibida de su entorno a través de sus sensores.
3.
Androides
Son Robots
que intentan reproducir total o parcialmente la forma y el comportamiento
cinemática del ser humano.
4.
Zoomórficos
Los Robots
zoomórficos, constituyen
una
clase caracterizada principalmente por sus sistemas de locomoción que imitan a
los diversos seres vivos.
5.
Híbridos
Corresponden
a
aquellos de difícil clasificación cuya estructura se sitúa en combinación con
alguna de las anteriores ya expuestas, bien sea por conjunción o por
yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas,
es al mismo tiempo uno de los atributos de los Robots móviles y de los Robots
zoomórficos.
ESTRUCTURA BÁSICA DE UN ROBOT


MECÁNICA
UNIDAD 3. LA MECÁNICA
Cinemática y Dinámica
Cinemática de Robots
Elementos mecánicos
Tipos de Engranajes
Tipos de Engranajes
Rueda y Poleas
ESTRUCTURAS BÁSICAS




ENGRANAJES
Es una rueda o cilindro dentado empleado para transmitir un movimiento giratorio o alternativo desde una parte de una máquina a otra.
Un conjunto de dos o más engranajes
que transmite
el movimiento
de un eje a otro se denomina tren de engranajes.
Los engranajes son sistemas de transmisión del movimiento circular constituidos por el acoplamiento, diente a diente, de dos ruedas dentadas, una motriz y otra conducida. A la mayor se le denomina corona y a la menor piñón.
Los engranajes se utilizan sobre todo para transmitir movimiento giratorio, pero usando engranajes apropiados y piezas dentadas planas pueden transformar movimiento alternativo en giratorio y viceversa.
DIAGRAMA DE FLUJOS
Es
una representación gráfica detallada que muestra la naturaleza y la secuencia
paso a paso de una operación. Son un lenguaje de programación gráfico. Es una representación gráfica de un
algoritmo o proceso.
Características:
Un
diagrama de flujo siempre tiene un único punto de inicio y un único punto de
término. Además, todo camino de ejecución debe permitir llegar desde el inicio
hasta el término.
Simbología
Óvalo: Inicio y término (Abre y/o cierra el
diagrama).
Rectángulo: Actividad (Representa la ejecución de
una o más actividades o procedimientos).
Rombo: Decisión (Formula una pregunta o
cuestión).
Círculo: Conector (Representa el enlace de
actividades con otra dentro de un procedimiento).




Se desconecta el módulo bluetooth (dejar
libre el RX (pin 0) del Arduino).
Se conecta el módulo bluetooth y se configura la
aplicación APP.
Un TCRT5000L es un tipo de sensor óptico
reflectivo que detecta la diferencia de color en un objeto mediante la
reflexión de la luz en el mismo.
El TCRT5000L dispone de un LED emisor de luz infrarroja, y de un fototransistor
que recibe la luz reflejada por un posible obstáculo. La cantidad de luz
recibida depende del color y reflectividad del objeto, por lo que podemos
distinguir entre zonas y oscuras de un objeto.
El rango de medición del sensor varía entre 0.2 a 15mm, siendo la distancia
óptima 2.5mm. Por tanto es un sensor de muy corta distancia.
El módulo L298N
es un motor driver (controlador) con un doble puente H que permite manejar dos
motores de corriente continua o un motor paso a paso bipolar de entre 5V y 35V
y de hasta 2 Amperios por salida, controlando la velocidad y el sentido de giro
de los motores.
Los pines de entrada que controlan la dirección y
velocidad de giro:
Los pines ENA, IN1 e IN2 controlan la salida A.
Los pines ENB, IN3 e IN4 controlan la salida B.Los pines IN1, IN2, y IN3 e IN4, controlan la dirección de giro, respectivamente, de la salida A y B.
Los pines ENA y ENB desactivan la salida. Podemos conectarlos permanentemente mediante el uso de un jumper, o conectar una señal PWM para controlar la velocidad de giro.
En el caso de querer usar ambas fases, y poder elegir tanto
el sentido de giro como la velocidad, y alimentar desde una fuente de 12V, al
pin Vin de Arduino (usando el regulador de voltaje de Arduino), o desde el pin
Vlogico del L298N al pin 5V de Arduino (usando el regulador del L298N).
CONTROL DE UN MOTOR
CONTROL DE DOS MOTORES
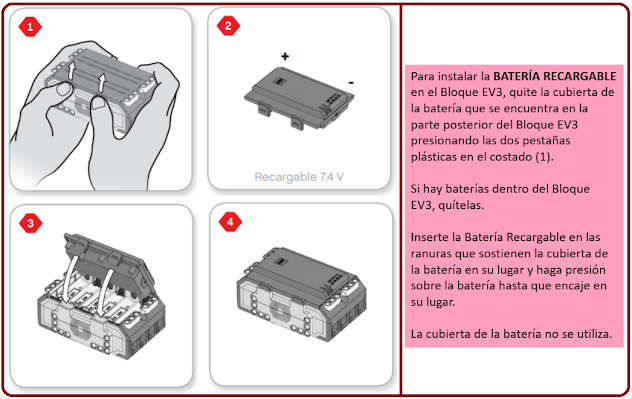
GUÍA LEGO MINDSTORMS EV3
Fuente: Lego education
BLOQUE EV3
BATERIA RECARGABLE
PUERTOS DE ENTRADA Y SALIDA
MOTORES
SENSOR DE COLOR
GIROSENSOR
SENSOR TÁCTIL
SENSOR ULTRASÓNICO
CONEXIÓN DEL BLOQUE EV3 AL PC
INTERFAZ
PUERTOS CONECTADOS
P R O G R A M A C I Ó N
PRÁCTICA 1: Programar ROBOT EDUCATOR para que avance en línea
recta, durante un tiempo, luego gira, formando una trayectoria regular de un cuadrado.
PRÁCTICA 2: Programar ROBOT EDUCATOR para que realice un movimiento
en paralelo a una pared, girando en las esquinas.
PRÁCTICA 3: Programar ROBOT EDUCATOR para que detecte obstáculos, con el sensor infrarrojo, avisando por medio de sonidos.
PRÁCTICA 4: Movimiento del robot paralelo a las paredes, sin chocar, buscando la salida del laberinto.
PRÁCTICA 5: Detenerse cuando encuentre una línea negra.
PRÁCTICA 6: En un área circular están contenidos dos objetos. Programar un robot para que traslade los objetos desde el círculo a un lugar exterior a este.



{kind=link}
1 Comentarios
Maybe not, however that’s definitely the case with high on line casino bonuses, the place the 카지노 larger — the higher. That mentioned, how much you stand to assert in bonus money performed a giant part when narrowing down this listing of high bonus codes. BetOnline has been serving the online playing industry much less than|for at least|for a minimum of} 1 / 4 of a century.
ResponderEliminar